Liste des identificateurs et paramètres pour le matériel roulant.
Identificateur : [Vehicle]
Entrées et paramètres généraux pour chaque type de matériel roulant (avec moteur et sans moteur).
Entrées
Paramètres
Descriptions
AxisPreset01
A partir d'EEP16
FLOAT
= 0.6806784, 0.4084071, 01337202 (exemple)
Définit un préréglage des paramètres d'axe accessibles pour l'utilisateur classés par numéro d'axe. Il est ainsi possible de créer 16 préréglages. Autrement la méthode de création de ces entrées incombe à l'utilisateur et consiste à créer les préréglages dans EEP, à enregistrer le projet pour écrire les valeurs dans le fichier .anl3 dans les sections <AxisPreset>.
BackBumper
FLOAT
= 800.0
Longueur en centimètres entre le point zéro du système de coordonnées (origine) et le bord extérieur des tampons arrière ou du pare-chocs arrière. La valeur détermine le moment où le matériel roulant est repoussé ou couplé à un autre matériel roulant.
Il existe le même paramètre FrontBumper pour les tampons / pare-chocs avant.
Box...
INT
BoxX+ = 900
BoxX- = 900
BoxY+ = 900
BoxY- = 900
BoxZ+ = 900
BoxZ- = 900
Ces valeurs symbolisent une pièce cubique (une boite) dans laquelle la locomotive doit rester en toutes circonstances.
Les valeurs avec un + indiquent une section située sur l'axe positif, les valeurs avec un - une section sur l'axe négatif. Les valeurs elles-mêmes sont toujours positives et en cm.
Lors du déplacement d'axes de pantographes, de bogggies, etc., aucune pièce du modèle ne peut quitter la zone de la boîte, car cela entraînerait des erreurs d'affichage dans EEP.
Cependant, les rotations de l'ensemble de la locomotive ne sont pas prises en compte, ici le cube est également pivoté.
Note : La valeur ne doit pas être surestimée, car cela affecte significativement les performances dans certaines situations. Il faut définir le plus petit cube possible dans lequel toutes les pièces du modèle peuvent toujours avoir leur place dans chaque position de mouvement.
Breaks
FLOAT
= 10.0
Force de freinage passive.
La force qui s'oppose à la force motrice est exprimée en kiloNewton (kN).
La force de freinage naturel (ou passif) est la résistance au roulement due au frottement des roues sur la voie ferrée/route (les autres composants de frottement sont négligeables dans EEP).
Cela provoque inévitablement l'arrêt du matériel roulant à un moment donné.
Note : Les wagons de marchandises appelés à rouler sur la 'bosse de triage' doivent être pourvus d'une force de frottement correspondante faible.
DisableConnection
INT
0 ou 1
-
= 0 (activé par défaut pour le matériel ferroviaire)
= 1 (désactivé par défaut pour les véhicules à moteur)
État du coupleur (avant et arrière) lors de la mise en place d'un matériel roulant.
Le coupleur est désactivé par la valeur 1, c'est-à-dire qu'il est inactif.
Avec le matériel roulant ferroviaire, les couplages sont toujours activés. Par contre, dans le cas des véhicules à moteur, ils sont toujours désactivés lorsqu'un nouvel matériel roulant est inséré.
FieldState
A partir d'EEP16.4
INT
0 à 10
-
= 0 (supprime complètement la voie)
Indique l'état de dégradation de la voie dans lequel le véhicule doit entrer. Les états sont définis individuellement dans les voies "modifiables" définies par les entrées PeriodPart, Layer##Kons et Layer##Axis.
Note : Cette entrée est très similaire à l'entrée FieldWork et est également liée aux entrées FieldWorkAxis, FieldWorkOfs et FieldWorkCheckOfs.
FieldStateSide
A partir d'EEP16.4
INT
-1, 0, 1
Spécifie le sens de fonctionnement des véhicules qui 'dégrade' la voie conformément à l'entrée FieldState.
- En arrière
- Dans les deux sens
- Vers l'avant
FieldStateAxis
A partir d'EEP16.4
INT
= n° de l'axe
Spécifie le numéro de l'axe qui indique l'état dans lequel le véhicule modifie la voie empruntée. L'entrée est analogue à FieldState et l'axe indiqué sélectionne un état en fonction de l'intervalle du curseur dans lequel il se trouve - de 1 à 10.
FieldWork
INT
0 ou 1
-
= 0 (par défaut)
Détermine si le véhicule est une machine agricole logiquement liée à une voie agricole (avec la section [Field] ajoutée). Le véhicule agricole active un axe spécial lorsqu'il entre dans une telle voie.
- Machine agricole non utilisée pour le travail agricole.
- Machine agricole en mesure d'effectuer du travail agricole.
Exemple de projet : Technik\Farm_GenericHarvester
FieldWorkAxis
INT
1 à 99
-
= 0 (par défaut)
Indique le numéro de l'axe (valeur comprise entre 1 et 99) à mettre en position maximale avant que le véhicule agricole ait parcouru la 'spline' agricole ('style de voie' en tant que champ animé ou terre agricole).
Exemple : une moissonneuse batteuse a besoin d'avoir son organe de coupe au plus bas pour moissonner un champ. l'axe représentatif doit être à la position maximale (c'est-à-dire au plus bas si la plus grande valeur est affectée à cette position).
Exemple de projet : Technik\Farm_GenericHarvester
FieldWorksOfs
FLOAT
-∞ à +∞
-
= 0.0 (par défaut)
La valeur détermine la distance entre les coordonnées 0, 0, 0 du modèle (champ par exemple) le long de l'axe X et les coordonnées du véhicule où les caractéristiques de la 'spline' agricole ('style de voie' en tant que champ animé ou terre agrcole) doivent être modifiées, par exemple lors du fauchage ou du labourage d'un champ.
Exemple de projet : Technik\Farm_GenericHarvester
FieldWorkCheckOfs
FLOAT
-∞ à +∞
-
= 0.0
Distance en mètres depuis l'origine jusqu'au point de contrôle de la 'spline' agricole.
La valeur détermine la distance entre les coordonnées 0, 0, 0 du modèle (champ par exemple) le long de l'axe X et les coordonnées du véhicule à laquelle on vérifie si le véhicule est entré dans la 'spline' agricole ('style de voie' en tant que champ animé ou terre agricole). Habituellement, cette valeur est légèrement plus élevée que 'FieldWorkOfs', mais toujours très proche.
Exemple de projet : Technik\Farm_GenericHarvester
FrontBumper
FLOAT
= 800.0
Longueur en centimètres entre le point zéro du système de coordonnées (origine) et le bord extérieur des tampons avant ou du pare-chocs avant. La valeur détermine le moment où le matériel roulant est repoussé ou couplé à un autre matériel roulant.
Il existe le même paramètre BackBumper pour les tampons / pare-chocs arrière.
HangLength
FLOAT
= 0.0
Longueur de la suspension en mètres (uniquement pour les modèles à suspension, par exemple : téléphérique).
La valeur spécifie la longueur de la suspension à partir de l'origine de l'objet (0,0,0), qui est utilisé pour calculer le mouvement pendulaire. Idéalement, l'origine de l'objet est le bord inférieur de la poulie de câble et la longueur de la suspension jusqu'au bord inférieur du modèle suspendu. Le calcul physique du mouvement pendulaire est lié aux axes système '_GravityX' et/ou '_GravityY'.
Note : La vitesse d'oscillation de la suspension dépend uniquement de sa longueur et non de sa masse.
MaxBreaks
FLOAT
= 132.0 (exemple)
Puissance de freinage.
Puissance de freinage maximale en kiloNewton (kN). La distance de freinage est calculée à partir de la force de freinage.
Pantograph1
Pantograph2
Pantograph3
Pantograph4
INT
1 à 4
-
= 1
Définit le numéro de l'axe principal du pantographe numéro 1, 2, 3 ou 4.
La valeur (comprise entre 1 et 4) est le numéro de l'axe principal du pantographe. Le pantographe et l'axe respectif doivent exister. Si la position de l'axe est inférieure à la valeur maximale, le pantographe est alors isolé électriquement (abaissé). Si tous les pantographes d'une locomotive électrique sont désactivés, elle n'est pas alimentée en courant électrique et ne peut donc pas fonctionner. (Cette fonctionnalité peut être désactivée dans le programme EEP si nécessaire).
Exemple de projet : Rollmaterial\Lokomotiven\DB_110-225-bl-EpIV_SK2
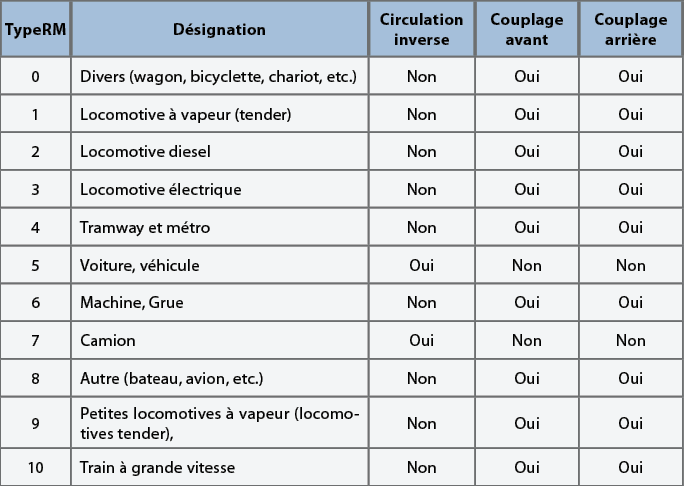
SoundType
INT
0 à 10
-
= 0 (par défaut)
Système de sonorisation des véhicules et les propriétés sonores correspondantes.
Ci-dessous, le tableau avec les différents paramètres selon le type de Matériel Roulant (TypeRM) :
Springs
INT
0 à 100
-
= 50
Inclinaison d'un véhicule dans les courbes et lors de l'accélération ou décélération.
Exemple de projet : Technik\Car_Physics_Preview
A partir d'EEP17, une valeur négative est possible, ainsi qu'une valeur supérieure à 100, ce qui entraîne une inversion de ce comportement pour les mouvements latéraux, permettant la simulation d'une voie unique inclinée.
Swimming
INT
0 à 100
-
= 50
Influence des vagues sur le comportement des objets flottants à la surface de l'eau. La valeur se réfère exclusivement aux véhicules nautiques (type Wasserfahrzeug).
Exemple de projet : Animation\Boat_Rollmaterial_Floating et Technik/Ferry
UserCamPos
A partir d'EEP15
FLOAT
-
= 0.0,0.0,0.0
Position X, Y, Z par défaut en cm de la caméra de l'utilisateur "collée" au véhicule (dans EEP, bouton par défaut [9] ).
UserCamAngleHor
A partir d'EEP15
FLOAT
-
= 0.0
Rotation horizontale par défaut de la caméra.
UserCamAngleVer
A partir d'EEP15
FLOAT
-
= 0.0
Rotation verticale par défaut de la caméra.
Weight
FLOAT
-
= 50000.0
Poids du matériel roulant en kilogrammes (Kg).
Important pour les calculs liés aux mouvements du véhicule et aux collisions. L'utilisation du poids réel au lieu de la masse est bien plus précise. La valeur joue un rôle dans le repoussage de deux matériels roulants l'un de l'autre. Les wagons légers sont repoussés plus facilement que les wagons lourds. De plus, cette valeur détermine l'inertie lors de l'accélération et la force de traction nécessaire dans les pentes.
WindInfluence
FLOAT
-
= 1.0
Influence du vent (uniquement pour les modèles pendulaires (à suspension), comme un téléphérique par exemple) utilisant les axes systèmes _GravityX et/ou _GravityY.
Exprime la résistance aérodynamique du modèle et influence son oscillation. Si la résistance à l'air du modèle est faible (en raison de sa forme aérodynamique ou d'une petite prise au vent), la valeur du paramètre doit être faible (par exemple 0,1).
Identificateur : [Vehicle_Motor]
Entrées et paramètres pour le moteur du matériel roulant (par exemple : locomotives, voitures, camions, camions, avions, bateaux).
Entrées
Paramètres
Descriptions
Power
FLOAT
-
= 3000.0
Puissance du moteur en kW. Une puissance plus élevée vous permet d'atteindre des vitesses plus élevées, de grimper des côtes plus raides et de surmonter une plus grande résistance au roulement.
Si la puissance n'est connue qu'en cheval-vapeur, elle peut être convertie en kW à l'aide de la formule suivante : kW = cheval-vapeur * 0,7355.
RatioValue_U1
RatioValue_U2
RatioValue_U3
FLOAT
-
= 900.0
Spécifie la courbe d'accélération et le changement de vitesse en fonction du régime.
- U1 Spécifie le nombre de tours par minute (tr/min) avec le couple maximum. Exemple : 1000 tr/min,
- U2 Détermine le régime moteur pour le changement de vitesse de la transmission en mode automatique. Exemple : 5000 tr/min,
- U3 Spécifie à partir de quelle vitesse (en tours/minute) le moteur agit comme un frein (frein-moteur).
Skid
INT
0 ou 1
-
= 0 (par défaut)
Patinage des roues.
Facteur de patinage des roues lors de l'accélération et de la décélération.
0.0 = Aucun patinage,
1.0 = Patinage au maximum.
Les valeurs comprises entre 0,0 et 1,0 déterminent la valeur réelle du patinage de la roue.
Identificateur : [Vehicle_Transmission]
Entrées et paramètres pour la transmission du matériel roulant.
Entrées
Paramètres
Descriptions
Count
INT
2 à 6
-
= 4 (par défaut)
Total du nombre de vitesses avant et arrière. Il est nécessaire d'avoir le même nombre à égalité avec l'entrée Gear# .
Gear#
FLOAT
= - 8.40 (exemple)
Rapport de transmission #. Augmentation ou réduction des vitesses successives. Plus la valeur est élevée, plus la vitesse est faible mais plus la traction est importante.
Une valeur pour le rapport de transmission doit être attribuée pour chaque vitesse. La séquence commence généralement par une marche arrière. Pour qu'EEP sache qu'il s'agit d'une marche arrière, la valeur doit être négative.
- La vitesse du véhicule résulte de la vitesse de rotation et des facteurs de transmission : v[cm/min] = (2 * ∏ * rayon de roue motrice[cm]) / (facteur de transmission * vitesse [rpm]). v[km/h] = 0,0006 * v[cm/min],
- La force de traction résulte de la formule suivante : F[kN] = Rapport de transmission * Couple/rayon de roue motrice. F[t] = environ F[kN]/10,
- La formule pour le couple à U#1 est : D[kN * m] = Puissance moteur[kW] / (2 * ∏ * U#[rpm]).
1 = valeur de la propriété RatioValue_U#
[Vehicle_Motor]
Power = 2200.0
RatioValue_U1 = 2000.0
RatioValue_U2 = 2800.0
RatioValue_U3 = 3500.0
Skid = 0
[Vehicle_Transmission]
Count = 6
Gear1 = -6.80
Gear2 = -9.70
Gear3 = -11.60
Gear4 = 11.60
Gear5 = 9.70
Gear6 = 6.80
WheelRadius = 62.0
Note : le nombre de valeurs pour le rapport de transmission doit être égal au nombre de vitesse défini par la propriété Count.
WheelRadius
FLOAT
= 100
Rayon des roues motrices en centimètres.
Identificateur : [Vehicle_Sound]
La section [Vehicle_Sound] concerne les objets du type matériel roulant. Elle permet de modifier les différents éléments du schéma sonore des véhicules.(voir aussi SoundType).
La valeur texte décrit le chemin d'accès au fichier son dans le dossier Resourcen/Sounds. Dans le cas du texte EEXP\Roll_Feuerwehr.wav, il s'agit du fichier Resourcen/Sounds/EEXP/Roll_Feuerwehr.wav. Le fichier dummy.wav est utilisé pour couper un type de son particulier.
Entrées
Paramètres
Descriptions
Signal
TEXT
='EEEXPIGNALHORN_E10.wav'
Son d'un signal sonore émis par un véhicule. Par exemple, le klaxon d'une voiture, le signal d'avertissement d'une locomotive, la sirène d'un navire.
Steam
TEXT
= 'EEXP\dummy.wav'
Son associé à la libération de la vapeur des cylindres d'une locomotive à vapeur.
Start
TEXT
= 'EEXP\
Anfahr_E10.wav'
Son émis lorsqu'un véhicule démarre de l'arrêt en utilisant son propre moteur. Il peut s'agir du son d'un moteur qui démarre ou du son d'un cheval qui avance dans le cas d'un attelage.
Breaks
TEXT
= 'EEXP\
EEXP\Bremse_E10.wav'
Son produit par le freinage du véhicule.
Run
TEXT
= 'EEXP\EEXP_Lauf_E10.wav'
Son produit par le moteur en fonctionnement du véhicule.
Roll
TEXT
= 'EEXP\
EEXPRoll_Feuerwehr.wav'
Son produit par un véhicule en mouvement indépendamment du fonctionnement ou même de l'existence du moteur, tel que le bruit des roues sur les rails ou le bruit des pneus sur l'asphalte.
Curve
TEXT
= 'EEXP\dummy.wav'
Son associé au virage d'un véhicule. Il devient plus prononcé à des vitesses plus élevées dans des virages plus serrés.
Identificateur : [Vehicle_ImmoModell]
Section ajoutée au matériel roulant pour transporter d'autres véhicules (vers une remorque, des ferries…)
Entrées
Paramètres
Descriptions
Model
TEXT
="Gleisobjekte\System\FerryGleisObj"
Nom du modèle de Gleisobjekt sans extension. Les véhicules qui peuvent transporter d'autres véhicules le font via le Gleisobject (Gleisobject = Objet de voie) installé avec eux. Le fait de le placer dans le dossier système le rendra inopérant dans la mesure où aucun lien avec la remorque ou ferry n'aura été établi.
Layer
INT
2, 3, 4, 5
= 2
Numéro de la catégorie à laquelle est affecté le type d’objet pour le ferry ou une remorque, c'est-à-dire les véhicules qui peuvent les utiliser :
- 2 = Chemin de fer
- 3 = Route
- 4 = Tramway
- 5 = Autres véhicules
Track
INT
34, 35, 36, 37
= 34
L'identifiant de la voie installée sur le véhicule. En général, l'une des voies invisibles suivante est utilisée :
- 34 = Voie ferrée invisible
- 35 = Route invisible
- 36 = Voie de tramway invisible
- 37 = Rivière ou autres voies invisibles
Stop
INT
= 2
Distance à laquelle s'arrête le premier véhicule entrant dans le ferry ou la remorque (longueur de la voie).
Exemples de projets : Technik\Ferry et Technik\FerryGleisObj
Identificateur : [Vehicle_Cabin]
Paramètres pour la vue depuis la cabine lors de l'activation de la caméra.
Entrées
Paramètres
Descriptions
Pos
FLOAT
= 1160.0,-60.0,280.0
Position de la visée de la caméra numéro 1 de la cabine (pour la marche avant) en centimètres ; X, Y, Z. La visée de la caméra correspond à une distance d'environ 50 cm de ce point.
AngleHor
FLOAT
= 0.0
Angle de vue horizontal par défaut de la caméra 1. La valeur 0.0 signifie vers l'avant dans l'axe des X.
AngleVer
FLOAT
= 5.0
Angle de vue vertical par défaut de la caméra 1. Une valeur négative signifie vers le bas, une valeur positive signifie vers le haut.
Pos2
FLOAT
= 1160.0,-60.0,280.0
Position de la visée de la caméra numéro 1 de la cabine (pour la marche arrière) en centimètres ; X, Y, Z. La visée de la caméra est placée à une distance d'environ 50 cm de ce point.
AngleHor2
FLOAT
= 0.0
Angle de vue horizontal par défaut de la caméra 1. Une valeur de 180,0 signifie vers l'arrière.
AngleVer2
FLOAT
= 5.0
Angle de vue vertical par défaut de la caméra 2. Une valeur négative signifie vers le bas, une valeur positive signifie vers le haut.
CabOfs2
FLOAT
= 4.50
Utilisé lorsqu'il existe un axe _CabinBasis contenant le modèle de cabine commune utilisé pour les deux cabines (elle est tournée de 180 degrés en cas de marche arrière) et spécifie le décalage de cette cabine commune le long de l'axe X (en centimètres) pendant la marche arrière. Ce paramètre permet d'ajuster la position du modèle de la _CabinBasis par rapport aux éléments extérieurs à la _CabinBasis (tels que les essuie-glaces ou l'ouverture des fenêtres).
AngleHorRange
FLOAT
0.0 à 359.9
-
= 120.0
Plage de rotation horizontale possible de la caméra centrée sur l'angle défini par AngleHor et AngleHor2.
AngleVerRange
FLOAT
0.0 à 359.9
-
= 25.0
Plage de rotation verticale possible de la caméra centrée sur l'angle défini par AngleVer et AngleVer2.
Shake
INT
= 2 (par défaut)
Intensité du mouvement de la caméra de l'habitacle résultant du mouvement du véhicule. Plus la vitesse est élevée, plus la vibration est importante. La valeur ne doit pas être inférieure à 0,03.
ShowAxis##
FLOAT
= 0.030
Définit la visibilité de l'axe ## par rapport à la vue de la cabine. Utile pour l'optimisation (désactivation du rendu des axes physiquement invisibles tels que les roues) ou pour l'ajout de détails visibles et/ou fonctionnant uniquement dans la cabine (par exemple, les leviers de commande du train).
Valeurs autorisées :
- Axe non visible en mode cabine (par exemple, roues)
- Axe visible uniquement dans la cabine (par exemple, leviers de commande, indicateur de vitesse)
- Axe visible dans les deux modes (par exemple, essuie-glaces, ouverture de la fenêtre)
- Axe visible uniquement dans la cabine, peut être masqué par des objets situés entre l'observateur et l'axe
- Axe visible dans les deux modes, peut être masqué par des objets situés entre l'observateur et l'axe (utilisé par exemple, lorsqu'une charge soulevée par une grue masque le support opposé d'une grue à portique ou d'un crochet ou d'un câble lorsque la charge est soulevée au-dessus de l'observateur).
FuncAxis##
INT
= 15
Définit la fonction des axes dans la cabine et uniquement pour la vue en mode cabine. Indique les leviers, les interrupteurs et les autres commandes telles que la puissance du moteur, la vitesse, l'éclairage, les connexions actives et les pantographes. En outre, il peut s'agir d'éléments décoratifs mobiles qui n'affectent pas le fonctionnement du véhicule, tels que l'ouverture des fenêtres, les ventilateurs (dans ce cas, l'axe de type 15 est l'axe de commande de l'axe NonstopIf#) ou les stores des fenêtres.
Les axes d'un type donné peuvent être utilisés plusieurs fois. Il existe généralement de nombreux axes de type 15 et un axe de type 3 supplémentaire peut être, par exemple, un pointeur de manomètre de frein. Dans ce dernier cas, il convient d'abaisser sensiblement le paramètre VelocAxis## pour un tel pointeur (ce qui retarde la réponse du pointeur par rapport au réglage du frein) et d'ajouter l'entrée BreakAxis## = -1.0, qui empêche de commander les freins en cliquant sur le pointeur.
Valeurs autorisées :
- Conduite automatique (mode automatique destiné à maintenir la vitesse actuelle)
- Accélérateur (contrôle de la puissance, le modifier manuellement désactive le mode automatique)
- Freins du véhicule (dans le cas d'un train, s'applique uniquement à la locomotive elle-même, le changement manuel désactive le mode automatique)
- Vitesse (le changement de vitesse manuel désactive le mode automatique)
- Couplage avant
- Couplage arrière
- Eclairage des véhicules
- Signal sonore du véhicule
- Vitesse du train (définit la vitesse cible pour le mode automatique). Le paramètre BreakAxis## pour cet axe définit la vitesse maximale possible
- Arrêt d'urgence d'un train (réinitialisation des moteurs de toutes les locomotives et freinage de tous les véhicules du train)
- Pantographe n° 1
- Pantographe n° 2
- Pantographe n° 3
- Pantographe n° 4
- Elément cosmétique sans impact sur le contrôle du train, un clic permet de basculer entre le réglage minimum/maximum de l'axe
FuncAxis##
A partir d'EEP15
- (cd) Utilisée conjointement avec l'entrée :
- BreakAxis## permet un mouvement progressif de l'axe au clic (pas de min/max, min/max avec BreakAxis## = 0.0)
- SmoothAxis## = 1 permet de déplacer l'axe en maintenant le LMB (sans ce paramètre, plusieurs clics sont nécessaires).
- Activation du crochet pour les objets de type Goods (marchandises), un clic permet de basculer entre le réglage minimum/maximum de l'axe
- Activation de la surface de "collage" pour les objets de type Goods, un clic permet de basculer entre le réglage minimum/maximum de l'axe
FuncAxis##
A partir d'EEP15.1
- Reflète l'état du crochet. S'il est connecté à un autre objet, l'axe est réglé sur le maximum, sinon sur le minimum
- Reflète l'état de la surface de "collage". L'axe est réglé au maximum lorsqu'une connexion se produit, au minimum lorsqu'elle ne se produit pas
- Indique l'état de la connexion du véhicule avant : maximum lorsqu'il est connecté, minimum lorsqu'il est non connecté
- Indique l'état de la connexion du véhicule arrière : maximum lorsqu'il est connecté, minimum lorsqu'il est non connecté
{EEP 15.1} : pour que cela fonctionne, le numéro d'axe doit correspondre au numéro de fonction (résultat d'une erreur dans le code)
{EEP 17.1} : service complet
Exemples de projets :
- Technik\Farm_GenericHarvester,
- Technik/Crane,
- Technik/CabinSwitchTest
Identificateur : [Vehicle_SetAxis]
Définit les fonctions des axes des objets Rollmaterial qui sont utilisés aussi bien à l'intérieur qu'à l'extérieur de la cabine :
Entrées
Paramètres
Descriptions
FuncAxis##
INT
= 14
Fonctionne de la même manière que FuncAxis pour la section [Vehicle_Cabin], sauf que les axes entrés ici sont également déplacés en dehors de la vue cabine, de sorte qu'ils peuvent contrôler le mouvement d'éléments externes du modèle tels que les patins de frein d'une roue. Un axe saisi dans la section [Vehicle_SetAxis] n'a pas besoin d'être saisi une seconde fois dans [Vehicle_Cabin] pour être pleinement fonctionnel dans les deux vues (le clic sur l'axe reste cependant limité à la vue cabine).
Note : Entrer FuncAxis## = 15 (l'axe "cosmétique") dans la section [Vehicle_SetAxis] n'a aucun sens, puisque le but de cette entrée est de rendre cet axe cliquable.


